Hiện tại CLB có 1 số chip PIC18F và dsPIC30F với số lượng cụ thể như sau:
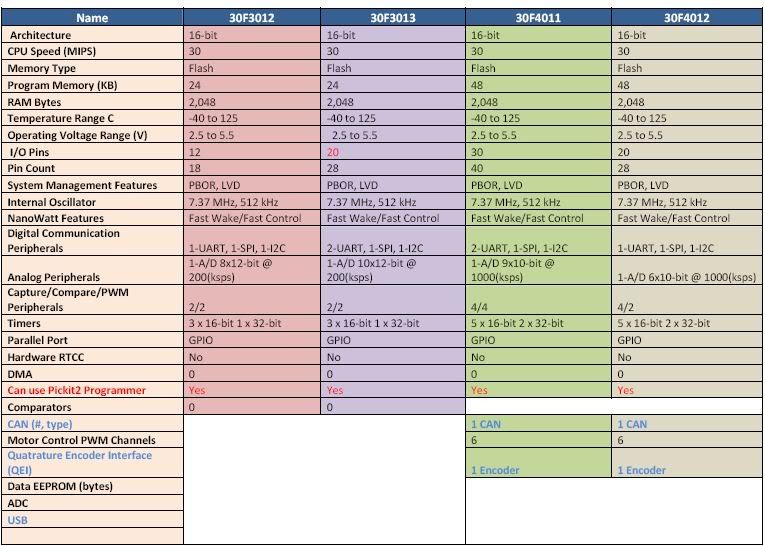
dsPIC30F3012: 4
dsPIC30F3013: 2
dsPIC30F4011: 3
dsPIC30F4012: 2
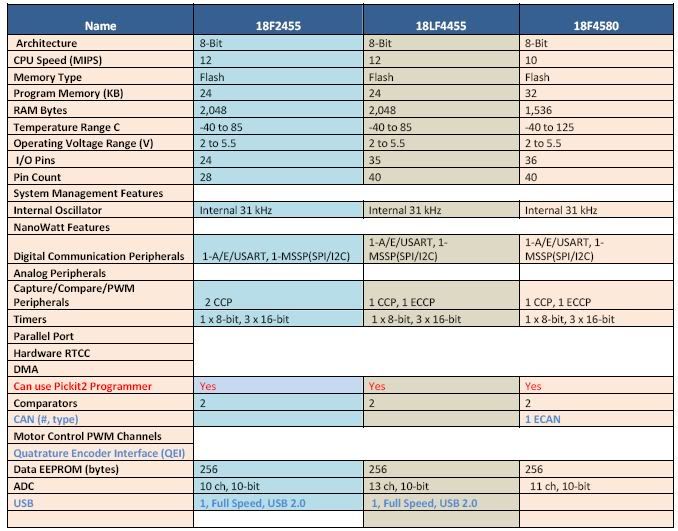
PIC18F2455: 3
PIC18LF4455: 2
PIC18F4580: 1
Tính năng của các chip này được tóm tắt trong bảng sau:
Trang 1:
Trang 2:
Tất cả đều thuộc loại DIP (hàn xuyên lỗ vô cùng thân thiện )
)
Các bạn có nhu cầu sử dụng chip này để tìm hiểu, đề nghị xem bản tóm tắt tính năng của các chip, sau đó gửi mail yêu cầu về hophuong.hcmut@gmail.com
Lưu ý:
- Đối với các chip có USB hay CAN chúng ta sẽ ưu tiên phát triển ứng dụng các chuẩn giao tiếp này.
- Sau khi có 1 số bạn nhận chip, chúng ta sẽ làm việc cụ thể với nhau sau")
- Tất cả các chip trên đều mạnh hơn 16F887 (tất nhiên!), cho nên ngoài các ứng dụng đặc biệt (CAN, USB, Encoder, ...) thì bạn hoàn toàn có thể sử dụng nó để thay thế PIC16F trong các ứng dụng thông thường (Timer, PWM, I2C, UART, ...)
dsPIC30F3012: 4
dsPIC30F3013: 2
dsPIC30F4011: 3
dsPIC30F4012: 2
PIC18F2455: 3
PIC18LF4455: 2
PIC18F4580: 1
Tính năng của các chip này được tóm tắt trong bảng sau:
Trang 1:
Trang 2:
Tất cả đều thuộc loại DIP (hàn xuyên lỗ vô cùng thân thiện
)Các bạn có nhu cầu sử dụng chip này để tìm hiểu, đề nghị xem bản tóm tắt tính năng của các chip, sau đó gửi mail yêu cầu về hophuong.hcmut@gmail.com
Lưu ý:
- Đối với các chip có USB hay CAN chúng ta sẽ ưu tiên phát triển ứng dụng các chuẩn giao tiếp này.
- Sau khi có 1 số bạn nhận chip, chúng ta sẽ làm việc cụ thể với nhau sau
- Tất cả các chip trên đều mạnh hơn 16F887 (tất nhiên!), cho nên ngoài các ứng dụng đặc biệt (CAN, USB, Encoder, ...) thì bạn hoàn toàn có thể sử dụng nó để thay thế PIC16F trong các ứng dụng thông thường (Timer, PWM, I2C, UART, ...)
